一、背景概述:
电机是以磁场为媒介进行机械能和电能相互转换的电磁装置。为了在电机内建立进行机电能量转换所必需的气隙磁场,可有两种方法:一种是在电机绕组内通以电流来产生磁场,如普通的直流电机,同步电机和异步电机等;另一种是由永磁体来产生磁场,即永磁同步电机。从原理来讲:永磁同步电机与传统电励磁同步电机是一样的,其唯一区别为传统的电励磁同步电机是通过在励磁绕组中通入电流来产生磁场的,而永磁同步电机是通过永磁体来建立磁场的。
直流有刷电机:机械换相
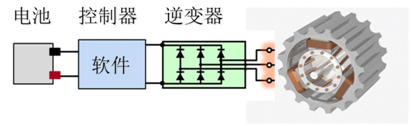
直流无刷电机:电子换相
直流有刷电机是通过内部的机械触点或“电刷”来完成整流的。无刷电机内部没有电刷,因此只能通过效率更高的控制器进行整流。控制器通常是运行某种反馈回路算法的微控制器。本案例中,反馈信号来自于安装在电机上的位置传感器,同时该反馈信号将用于内部控制环路去控制电流(25KHz),外部控制环路去控制电机速度(200Hz)。
永磁同步电机省去传统电机中的励磁绕组,集电环以及电机换相电刷,而采用永磁体来代替传统的电励磁系统,其定子和传统的电励磁三相同步电动机相似,因此称为永磁同步电动机(Permanent magnet synchronous motor,PMSM)。永磁同步电机同步就是指电流频率和转速是同步的。
二、方案实现:
1、系统模型
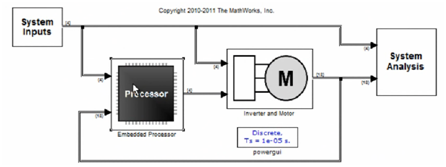
系统控制模型
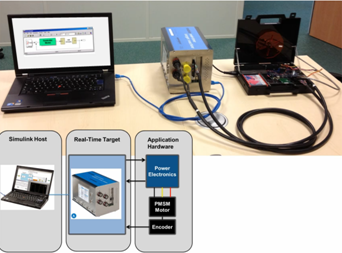
2、连接框图
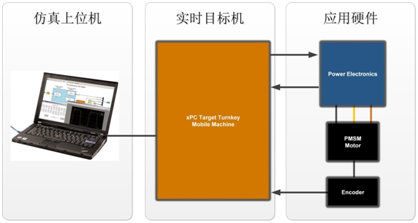
硬件连接框图
通过网线,将运行Simulink模型的上位机与实时控制器进行连接。电机由三相功率驱动板驱动,电机轴上安装有增量式编码器。功率器件是市场上现有的产品。
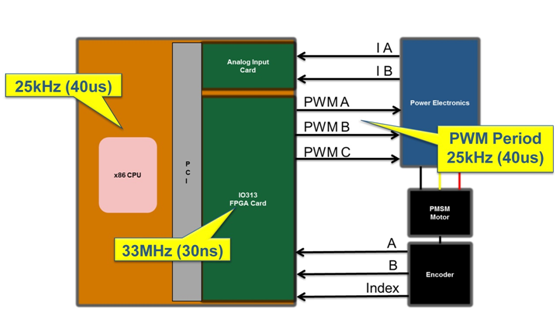
硬件详细构成图
Speedgoat的实时目标机可提供3路PWM输出通道,2路用于电流测量的模拟输入通道,3个专用的增量式编码器信号通道。这些接口由两个PCI接口的板卡提供。
3、功率器件
功率器件选用德州仪器的DRV8312三相无刷电机驱动器
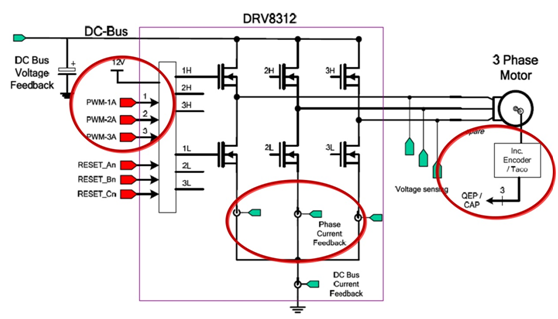
功率器件DRV8312简视图
4、实现方式
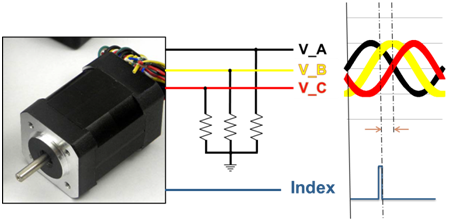
控制器采用PWM技术改变三相电机的电压。实时目标机提供3路PWM信号来驱动驱动芯片上的三个半桥。对于反馈信号,TI驱动板提供了电流检测电路以进行电流测量,同时使用光学编码器信号来确定电机的位置和速度。
5、时钟同步
同步是一个关键技术点。对于与PWM不同的信号,这些信号或高或者低。所以,某个确定时刻,每个桥的顶端或底端的三极管处于打开状态。对于电流测量点,只有当处于底端的三极管打开时,这些测量点才有电流流过。同时,我们需要使用回读信号来同步所有的控制信号。
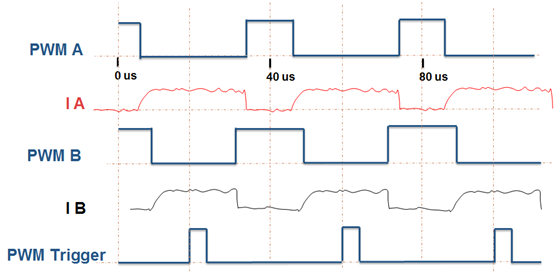
上图显示了需要同步的信号。每个PWM信号都必须进行同步,而这为电流测量提供了时间信息。
Speedgoat的xPC目标机进行简单的配置后,可以通过Simulink模块完成所有波形的时间同步,并使用外部中断去同步PWM的生成与模拟通道的采集。
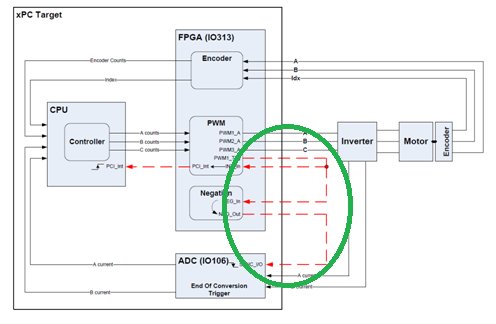
使用外部中断进行同步



